

开源 | 北京理工大学FSAC开源算法与数据集平台&官方网站正式上线
文案:潘博 陈泰然 封面:孙小晴 编辑:Wx

自2017年德国与中国同时举办无人驾驶方程式大赛以来,国内车队无人驾驶系统的起步普遍艰难,并与FSG车队的水平逐渐产生了较大差距。北京理工大学无人驾驶方程式车队对于无人驾驶赛事的研究起步较早,相对参赛经验更加丰富;同时,我们自建队以来就希望打造一个共享数据和算法交流的平台,以降低无人驾驶方程式赛事的难度门槛并促进国内所有车队在无人驾驶领域的发展。
为此,结合三年以来,四台赛车、四站比赛的经验以及各方资源的支持与汇总,我们决定开源部分适用于相关赛事的数据集与算法程序/资料作为车队之间互相参考与交流的平台。
下面分别对两个开源库进行介绍:
FSACOCO锥桶数据集
是适用于中国大学生无人驾驶方程式大赛的锥桶识别开源数据集
GitHub地址:
https://github.com/bitfsd/FSACOCO
我们初始提供超过1000张已标注的锥桶图片与标签,并采用YOLO标准格式标注。与此同时,提供了数据集的标注工具及格式转换脚本,方便各车队通过该工具对新收集到的数据集进行标注和训练。另外,支持各车队将自己的数据集上传至平台使数据平台进一步扩展,随着数据集的扩增,相信各车队会在整体感知识别的准确率和鲁棒性提升一个新的层次,也能够大大提升开发与测试效率。具体流程请各车队查看平台内的数据集获取和上传的教程。
fsd_algorithm开源算法
是适用于中国大学生无人驾驶方程式大赛动态赛的开源算法库
GitHub地址:
https://github.com/bitfsd/fsd_algorithm
我们总结2017赛季参赛以来算法开发的经验,并以2019赛季“灰鲨III”的算法程序和相关参考材料为主进行开源,采用通用的数据类型,涵盖感知、定位、规划三大模块。该开源资料仅供各车队参考和交流,并非赛事官方要求的解决方案。
下面进行部分算法的展示。
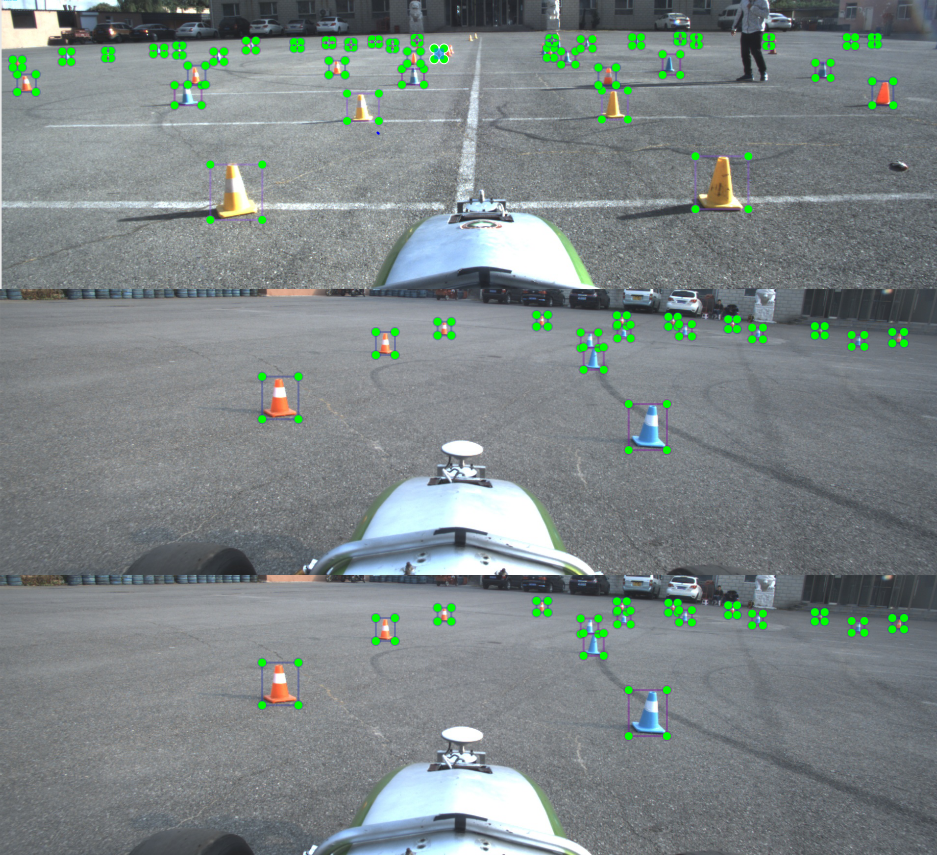
感知采用YOLOv3识别:

直线规划采用霍夫变换提取直线边界:
八字规划采用ICP地图匹配的方式,获得坐标变换关系,生成规划路径:
高速循迹采用图搜索树方式,找到cost最小的路径及边界:
鉴于车队能力所及范围有限,上述开源数据与算法并非最佳解决方案,也不能保证具有良好的赛道效果。该平台的目的是希望为各车队提供部分思路,提升开发效率,为车队之间的交流和技术的发展提供一个良好的环境。
该平台非赛事官方组织,仅由北京理工大学无人驾驶方程式车队队员自发组成。车队官方网站现已同步上线。
由于这是车队首次进行平台开发与维护,若有任何不妥或不便之处,欢迎通过email:bitfsd@163.com进行反馈与批评指正,给出意见,感谢各家车队的支持与信任。
最后,感谢赛事组委会、学校、赞助商以及各位队员多年来的支持。
另,特别鸣谢为该平台组建提供重大帮助的队员:
2017-2019赛季队长:
潘 博 董国顺 高小栋
2017赛季无人系统组:
田汉青 田戴荧 刘庆霄
2018赛季无人系统组:
陈泰然 李子睿 何羿霆
徐泽文 武润培 张春阳
2019赛季无人系统组:
李 想 王相彭 高旅业
丁秋雨 李炜玲

